1. 使用 yt_nic_install.sh
请注意:若使用此方法安装失败,则请使用第二种方法进行安装。
1.1 安装成功
将驱动安装包先进行 unzip 解压。
然后可以看到驱动安装包里面的安装脚本,如下图所示:
yt_nic_install脚本
依次使用如下命令:
1 | chmod +x yt_nic_install.sh |
1 | ./yt_nic_install.sh |
即可安装。
若成功安装,则安装指令及log截图如下:
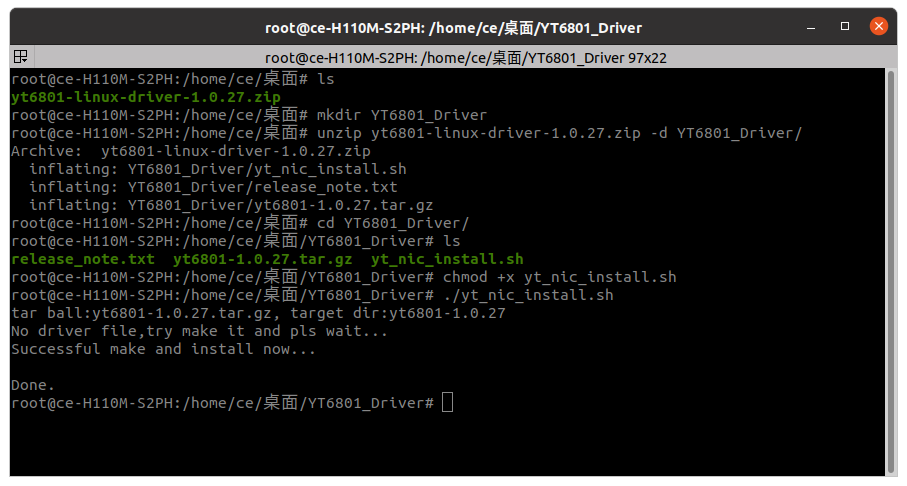
Driver安装成功示意图
除此之外,亦可以通过 lsmod、modinfo、ethtool 三个指令来检验驱动的安装状态。如下图所示:
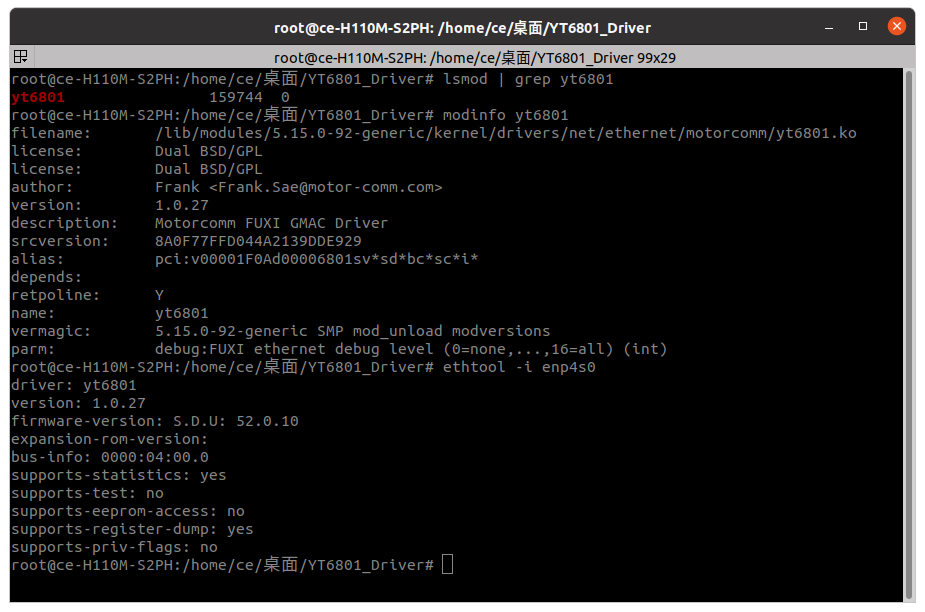
检查驱动安装状态
1.2安装失败
若使用 yt_nic_install 脚本安装失败,则出现如下 error log:

yt_nic_install脚本安装失败示意图
可以看到,若使用 yt_nic_install 安装失败,则不会出现任何对于debug来说有用的提示。
此时,请使用第二种方法(直接进行make)进行安装。
2. Make方法安装驱动
2.1安装成功
安装如下图指令,最终进行make编译,若为如下图log显示,则是表明安装成功。
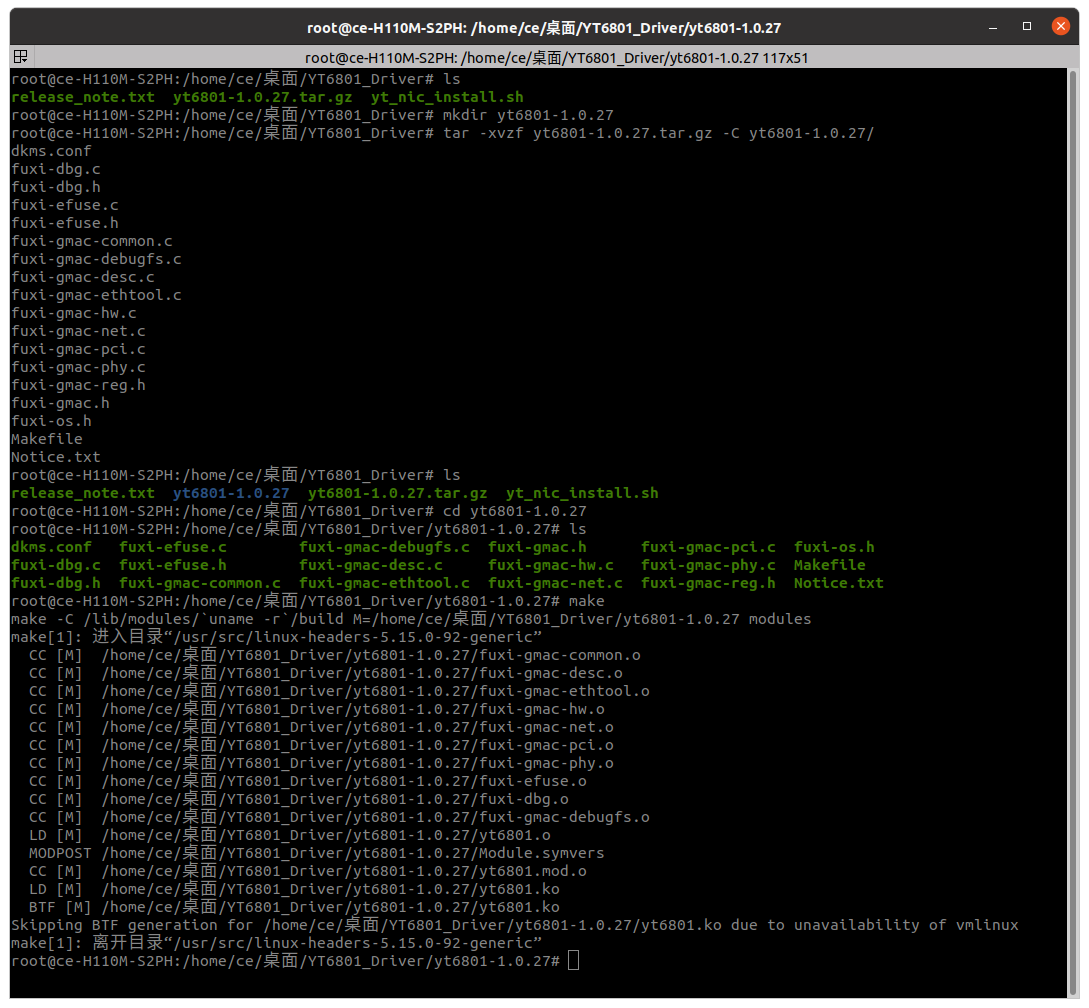
make编译成功示意图
接下来,请在如下目录建立 motorcomm 文件夹,使用如下指令即可:
1 | cd /lib/modules/5.15.0-92-generic/kernel/drivers/net/ethernet/ |
1 | mkdir motorcomm |
然后依次执行如下两步
将 make 指令生成的 yt6801.ko 文件 拷贝到内核ko文件加载目录中,指令如下图所示:
 拷贝yt6801.ko文件到内核目录
拷贝yt6801.ko文件到内核目录使用如下指令,分析可加载模块的依赖性,生成
modules.dep文件和映射文件。1
depmod -a
使用 reboot 指令进行重启即可。
2.2安装失败
若安装失败,则如下图所示,执行到 make 命令后,会提示各种编译错误信息。如下图所示:
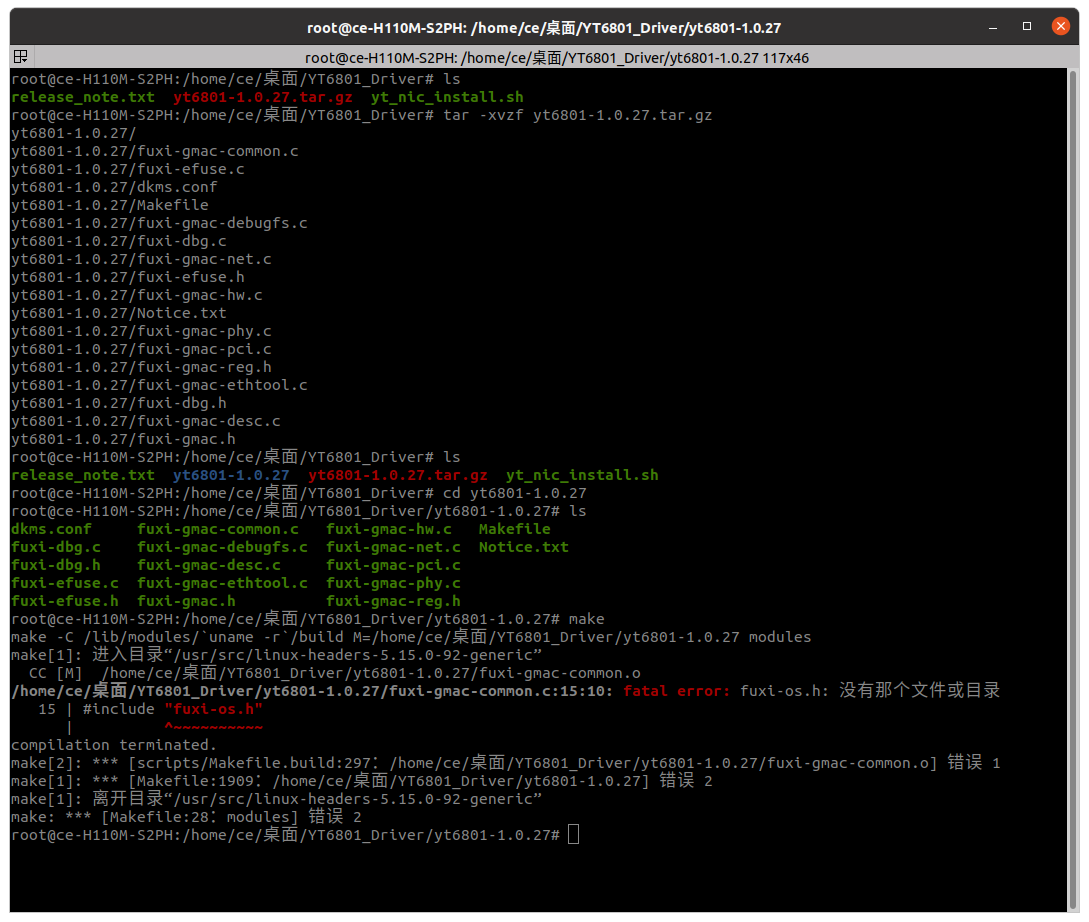
make编译失败示意图
如有需求,请将 make 错误信息发给 裕太微电子的FAE,以便debug。
如发现文章有错误、对内容有疑问,可以在评论区进行提问,也可以关注裕太微电子技术团队微信公众号(MotorcommTech),在后台给我们留言。